BAB MOTOR STEPPER
- Tujuan Eksperimen
Eksperimen ini bertujuan untuk mengetahui cara mengendalikan perputaran motor stepper langkah penuh, langkah separuh, dan cara mengendalikan arah geraknya. Tujuan khusus dari eksperimen ini adalah mencari tahu sudut pergerakan motor stepper setiap satu step pada mode langkah penuh (satu step bergerak berapa derajad?)
- Dasar Teori
Motor stepper adalah salah satu jenis motor DC yng dapat berputar pada sudut tertentu pada langkah tetap. Besarnya langkah bervariasi antara 0,9o hingga 90o. Motor stepper digunakan pada aplikasi yang memerlukan perputaran pada sudut tertentu namun tidak memerlukan feedback dari sensor posisi. Sudut perpindahan diketahui dengan menghitung jumlah langkah yang telah dilakukan. Motor stepper merupakan satu-satunya jenis motor DC yang pengendaliannya dapat dilakukan secara open loop. Contoh penggunaan motor stepper dapat dilihat pada printer dan scanner. Gambar 1 menunjukkan motor stepper.
Gambar 1. Motor stepper
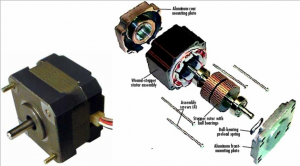
Gambar 2 merupakan konstruksi dasar dari suatu motor stepper jenis magnet permanen. Motor stepper terdiri dari rotor berupa magnet permanen dan stator berupa elektromagnet. Pada kenyataannya jumlah elektromagnet pada suatu motor stepper tidak hanya empat seperti pada Gambar 2, namun bisa berjumlah banyak. Meski demikian, untuk memudahkan pengaturannya, setiap elektromagnet tidak diatur secara individu, namun terdapat beberapa elektromagnet yang disatukan pengaturannya seperti terlihat pada Gambar 3.
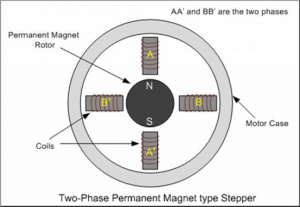
Gambar 2. Komponen motor stepper
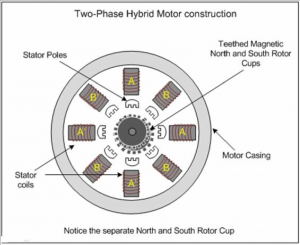
Gambar 3. Motor stepper dengan jumlah elektromagnet banyak
Posisi rotor akan tergantung pada kombinasi medan magnet yang dihasilkan oleh stator. Terdapat berbagai macam metode switching untuk menghasilkan kombinasi medan magnet untuk menggerakkan rotor.
Pengendalian gerakan putar motor stepper dapat dilakukan dengan memberikan arus ke setiap input pin terminal sesuai dengan tabel pengendaliannya. Tabel 1 menunjukkan contoh konfigurasi pengendalian motor stepper 5 pin input berupa 4 sinyal 1 common dengan mode langkah penuh (full-step).
Tabel 1. Contoh tabel pengendalian motor stepper langkah penuh
| Step | Kumparan stator | |||
| A | B | C | D | |
| 1 | 1 | 0 | 0 | 0 |
| 2 | 0 | 1 | 0 | 0 |
| 3 | 0 | 0 | 1 | 0 |
| 4 | 0 | 0 | 0 | 1 |
| 5 | 1 | 0 | 0 | 0 |
| 6 | 0 | 1 | 0 | 0 |
| 7 | 0 | 0 | 1 | 0 |
| 8 | 0 | 0 | 0 | 1 |
Tabel 2 menunjukkan contoh konfigurasi pengendalian motor stepper 5 pin input berupa 4 sinyal 1 common dengan mode langkah setengah (half-step). Dasar teori yang lebih komprehensif ada pada Lampiran file ini.
Tabel 2. Contoh tabel pengendalian motor stepper langkah setengah
| Step | Kumparan stator | |||
| A | B | C | D | |
| 1 | 1 | 0 | 0 | 0 |
| 2 | 1 | 1 | 0 | 0 |
| 3 | 0 | 1 | 0 | 0 |
| 4 | 0 | 1 | 1 | 0 |
| 5 | 0 | 0 | 1 | 0 |
| 6 | 0 | 0 | 1 | 1 |
| 7 | 0 | 0 | 0 | 1 |
| 8 | 1 | 0 | 0 | 1 |
- Metode Eksperimen
- Pengendalian langkah penuh
Pengendalian motor stepper langkah penuh khusus untuk jenis motor stepper yang ada di eksperimen ini dapat dilakukan dengan cara memberikan arus masukan kumparan stator sesuai Tabel 1.
- Pengendalian langkah setengah
Pengendalian motor stepper langkah setengah khusus untuk jenis motor stepper yang ada di eksperimen ini dapat dilakukan dengan cara memberikan arus masukan kumparan stator sesuai Tabel 2.
- Pengendalian arah putar
Berdasar teori dan konstruksi motor stepper, pengendalian arah putar motor stepper dapat dilakukan dengan cara membalik urutan terminal pemberian masukan arus pada kumparan stator.
- Penyelidikan derajad sudut gerakan satu langkah penuh
Derajad sudut gerakan satu langkah penuh motor stepper dapat dicari dari jumlah langkah penuh yang diperlukan oleh motor stepper untuk menempuh persis 1 putaran. Derajad sudut tiap satu langkah penuh adalah hasil bagi antara 360° dengan jumlah langkah untuk menempuh satu putaran.
- Alat dan Bahan
- PSU
- Rangkaian modul motor stepper
- Tata Laksana Eksperimen
- 5.1 Pengendalian langkah penuh
- Atur Adjustable Power Supply pada mode Constant Voltage
- Atur tegangan Adjustable Power Supply 12 VDC
- Posisikan semua switch rangkaian modul motor stepper pada kondisi off
- Hubungkan terminal (-) power suplai dengan (-) rangkaian modul motor stepper.
- Hubungkan terminal (+) power suplai dengan (+) rangkaian modul motor stepper.
- Berikan masukan sinyal kendali ke switch rangkaian modul motor stepper sesuai dengan Tabel 1.
- Catat pada laporan sementara arah gerakannya apakah searah jarum jam (CW) atau berlawanan dengan arah jarum jam (CCW)
- Lanjutkan sampai motor berputar satu putaran penuh
- Catat pada laporan sementara jumlah langkah yang diperlukan sampai satu putaran penuh
- 5.2 Pengendalian langkah setengah
- Lanjutkan dari urutan 5.1 langkah 1 sampai 5
- Berikan masukan sinyal kendali ke switch rangkaian modul motor stepper sesuai dengan Tabel 2.
- Catat pada laporan sementara arah gerakannya apakah searah jarum jam (CW) atau berlawanan dengan arah jarum jam (CCW)
- Lanjutkan sampai motor berputar satu putaran penuh
- Catat pada laporan sementara jumlah langkah yang diperlukan sampai satu putaran penuh
- 5.3 Pengendalian arah putar
- Lanjutkan dari urutan 5.1 langkah 1 sampai 5
- Berikan masukan sinyal kendali ke switch rangkaian modul motor stepper sesuai dengan Tabel 1.
- Catat pada laporan sementara arah gerakannya apakah searah jarum jam (CW) atau berlawanan dengan arah jarum jam (CCW)
- Berikan masukan sinyal kendali ke switch rangkaian modul motor stepper dengan urutan yang berkebalikan dari Tabel 1 atau pemberian arusnya berkebalikan dari
- Tabel 1 yaitu dari D, dilanjutkan ke C, dilanjutkan ke B, kemudian A, dan seterusnya.
- Catat pada laporan sementara arah gerakannya apakah searah jarum jam (CW) atau berlawanan dengan arah jarum jam (CCW)
- 5.1 Pengendalian langkah penuh

apa itu Motor Stepper?